


Ученые Казанского федерального университета разрабатывают алгоритм автономного преодоления лестницы роботом «Сервосила Инженер».
Профессор кафедры интеллектуальной робототехники Института информационных технологий и интеллектуальных систем, руководитель Лаборатории интеллектуальных робототехнических систем Евгений Магид рассказал о разработках, которые осуществляет его коллектив.
Речь идет о роботе, которого в лаборатории называют «Инженером», произведенным российской компанией «Сервосила».
«Наша лаборатория в основном занимается "обучением мозга робота" – разработкой новых протоколов взаимодействия, алгоритмов и программированием. Так и в случае с мобильным роботом "Сервосила Инженер", который от производителя пришел к нам с пультом управления типа joystick и возможностью получения данных только с одной из четырех имеющихся камер. Мы занимались доработкой и совершенствованием возможностей самого робота и коммуникации с ним, – пояснил Е. Магид. – В лаборатории созданы несколько видов графических интерфейсов для управления роботом как с компьютера, так и с мобильного телефона. На робота мы установили робототехническую операционную систему ROS, которая позволяет реализовывать различные алгоритмы, к примеру, навигация и картографирование, благодаря которым робот может самостоятельно ориентироваться в пространстве, строить двухмерную карту окружающего мира, а также прокладывать маршрут к цели, избегая препятствия».
Учеными Казанского университета разработан и реализован алгоритм автономного возвращения робота к оператору в случае потери связи. Сейчас ведется работа над алгоритмами автоматического открытия дверей и преодоления лестницы роботом.
«"Инженер" самостоятельно находит дверь с помощью встроенных камер. Затем, также ориентируясь по камерам и лазерному дальномеру, подъезжает к двери на нужное расстояние, выдвигает манипулятор на высоту дверной ручки и, захватив ее, начинает процесс открытия двери. Робот открывает дверь на 90 градусов, чего в большинстве случаев достаточно для дальнейшего проезда. Робот может открывать двери как на себя, так и от себя. Определение ручки осуществляется с использованием технологий машинного зрения и машинного обучения», – внес ясность Евгений Магид.
Созданы виртуальные модели робота в симуляторах Gazebo и Webots. Эти модели позволяют апробировать новые алгоритмы и программное обеспечение еще до переноса их на реального робота – это снижает время разработки и увеличивает безопасность разработчиков. Свои наработки ученые представили на конференции SIBCON.
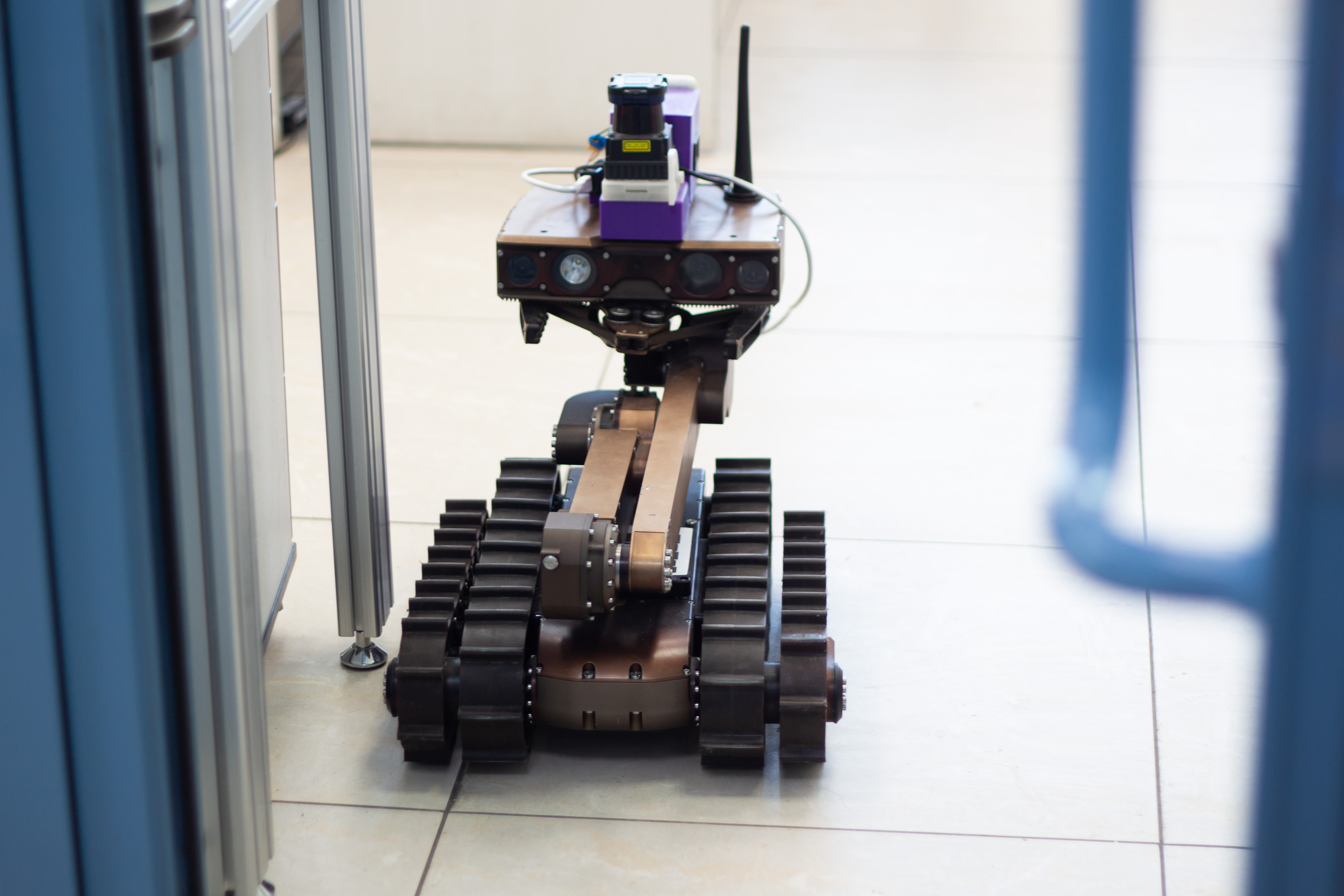
«Алгоритм преодоления лестниц (как и алгоритм автоматического открытия дверей) может быть использован в качестве дополнительного инструмента при управлении роботом как в режиме телеоперации (то есть, при удаленном управлении человеком-оператором через разработанные графические интерфейсы), так и в автономном режиме», – уточнил руководитель лаборатории.
Так, робот при помощи бортовых камер и лазерного дальномера самостоятельно опознает лестницу перед собой, высоту и количество ступеней. Далее он рассчитывает как правильно поднять передние дополнительные гусеницы и динамически менять положение манипулятора с головой робота, чтобы при подъеме или спуске по лестнице не произошло опрокидывания робота.
В команду разработчиков входят сотрудники и студенты ЛИРС. К слову, немалая часть проектов начинается как студенческие курсовые и дипломные работы. Далее, достигнутые студентами результаты дорабатываются сотрудниками для лучшей интеграции в уже имеющиеся системы управления роботов. Для управления проектами используется система GitLab. Уже имеется свыше 140 проектов различного масштаба и уровня сложности, пять из которых открыты для свободного использования научным сообществом и доступны по ссылке.
 395
395